Maintenance Technology for Long-span Bridges (Related to Maintenance Devices)
Bridge Monitoring System
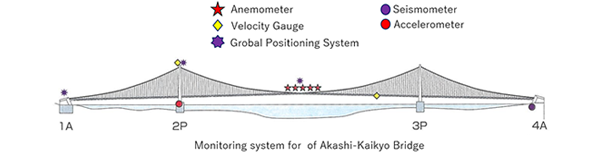
The suspension and cable-stayed bridges of the Honshu-Shikoku Bridge Project are large structures that far exceed the size of general bridges, so deformation due to natural external forces such as wind and earthquakes is great, and the behavior is also complicated. The behavior for long-span bridges is being studied in detail during the design. Besides confirming the validity of the design method, observation on actual behavior of the bridges offers several advantages; criteria to evaluate the condition of bridges for long-term maintenance and management, data for use in designing future bridges.
We conduct observation on fixed schedule for the suspension and cable-stayed bridges and have developed monitoring systems to observe the responses during strong wind and earthquakes. The observation equipment is a system that ensures data recording during strong winds and earthquakes, monitors observation data and system operation and notifies failures.
For example, the Akashi-Kaikyo Bridge is equipped with 5 wind vanes and anemometers, 1 accelerometer, 2 velocitymeters, 1 seismograph, and 3 GPS (Global Positioning System) observation machines, for collection various data.
The Akashi-Kaikyo Bridge is actually the first to have a permanently installed GPS for conducting long-term continuous measuring of the behavior on the suspension bridges.
Inspection and maintenance vehicle
Including the Akashi-Kaikyo Bridge, the Honshu-Shikoku bridges are located high above sea level with cars passing above and boats under the girder while trains run through the girder of Seto-Ohashi Bridge.
Under such harsh environments, inspection and maintenance vehicles are installed for each of the long-span bridges to ensure safe, reliable and efficient inspections of structures and facilities.
There are 152 inspection and maintenance vehicles located across the Honshu-Shikoku Expressway, including maintenance vehicles for inside girders, for outside girders, for tower, for cable, etc., according to each bridge structural type.
Aluminum alloys are used for the main members of these vehicles to ensure their durability and reduce their own weight.

Maintenance Vehicle for Outside Girder of Truss Bridge

Maintenance Vehicle for Outside Girder of Box Girder

Maintenance Vehicle for Inside Girder of the Akashi-Kaikyo Bridge

Maintenance Vehicle for Inside Girder of the Onaruto Bridge

Maintenance Vehicle for Tower of the Hitsuishijima Bridge

Maintenance Vehicle for Cable

Maintenance Vehicle for Cable
Main Tower Inspection Robot
Paint is applied to the tower of the long-span bridges for rust-proofing and aesthetics. But as paint deteriorates over time, inspection is indispensable during the overall recoating interval. Conventionally, although gondola facilities have been the only measures as a mean of access, setup requires long procedure. Therefore, we developed a main tower inspection robot that can easily capture condition of steel surface.
The robot can adhere to the vertical surface of main tower by its magnetic wheels, and can also pass over the bolted splice plates. The robot is equipped with a camera device and is operated from the ground. This allows safer and easier inspection work even on walls 280m above the ground.
Main Tower Inspection Robot
Steel Caisson Wall Surface Cleaning Device
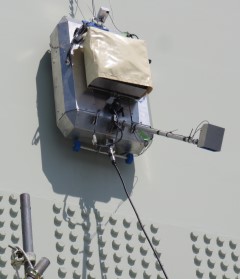
In order to implement the electrodeposition method to prevent corrosion of steel caissons, the wall surfaces must be cleaned beforehand (work to remove marine life, rust, and other deposits on the walls of caissons). Nevertheless, cleaning work previously handled by divers was not efficient, and the work is difficult where sea depth is over 40 m below sea level. So we developed a caisson wall surface cleaning device that can be remotely controlled from the ground to clean the caisson wall surface.
The operation is performed remotely from above the caisson, and the marine life, rust, and other deposits attached to the caisson wall are removed by high pressure water-jet injector.
As the device continuously sticks to the caisson wall surface by its magnetic wheels, it remains stable even in tides with speed of 2 knots. The device have increasingly improved efficiency, safety, cost and quality of the underwater cleaning work in contrast to manual operation by divers.

Steel Caisson Wall Surface Cleaning Device
Magnetic Wheel Gondola
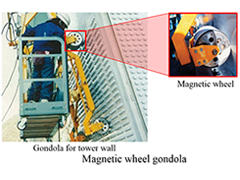
Operation capacity may be hampered as the height increases, and the paint quality and work efficiency may be lowered due to the instability of the gondola, caused by strong winds. Also, paint is easily dispersed due to the swaying by the wind, and as such large-scale environmental measures are required. For this reason, we developed a magnetic wheel gondola that can move while attached to a steel wall with a permanent magnet.
Rare earth neodymium magnets are built into the magnetic wheels, and the magnetic wheel gondola is not be swayed by its constant absorption to the walls with a maximum force of 2,500 N per wheel. Additionally, the steering mechanism allows for stable movement to any given position.
The magnet of the magnetic wheel can fix the axle to optional direction in which the maximum absorption force can be obtained, so it is structured to always obtain the highest absorption force on any wall surface. Also, since the surface of the wheel is covered with rubber, it will not damage the coating.
There are magnetic wheel gondola for tower shafts, for diagonal and for horizontal members, and can approach all over the surface of the tower members.
Magnetic Wheel Gondola for Tower Shaft

Magnetic Wheel Gondola for Diagonal/Horizontal Members
Vacuum Absorption Wheel Gondola
For the maintenance of concrete structures such as anchorage and pier on viaducts, etc. in coastal areas, since deterioration such as corrosion of the inner steel materials is generated due to the penetration of salt and carbonation, maintenance work such as periodic inspections and examinations, deterioration prevention, and restoration are important. While framework scaffolding and high elevation working vehicles are used for these maintenance work, usable areas are largely limited, and it is difficult to use around the base area. The gondola fulfills these conditions as a method of approach, but the gondola sways in the wind, and lack of ensuring absorbtion power and stable repair work have lowered the work efficiency. For this reason, we have developed the vacuum sucker wheel gondola that solves these problems. As vacuum sucker wheel gondolas rise and descend while absorbing on a concrete wall by vacuum power, there is no swaying in the wind, and the gondola receives its reactive force while remaining on the surface even a drill or other equipment is pressed against the wall, so work such as stable drilling work, similar to grounded work, is possible. The expansion function on the wheel enables it to move even on uneven wall surfaces stable.

Vacuum Sucker Wheel Gondola

Vacuum Wheel

Moving on Uneven Wall Surface
Suspension Bridge Hanger Rope (CFRC) Surface treatment Device
While the hanger type hanger rope (CFRC) of the suspension bridge has been coated to prevent corrosion, the painted surface may deteriorate over time; as such, periodic repainting is necessary. As the preprocessing work, surface treatment to remove the deteriorated coating film, was performed manually by workers riding the gondola using a disk sander, improvement of the work's efficiency and measures to prevent scattering of coating dust were necessary.
Therefore, we developed a surface treatment device that solves these problems. The device has four brushes in the upper and lower levels inside the cylinder, and the brushes are arranged on the entire circumference so as to uniformly contact the hanger rope (CFRC), and removes the coating and rust on the rope surface while moving up and down. Also, when raising and lowering the surface treatment device attached to the gondola, the entire outer periphery will be polished while rotating along the rope twist. The removed coating dust will be collected by a dust collector, preventing scattering.

Hanger Rope (CFRC) Surface treatment Condition

Hanger Rope (CFRC) Surface treatment Equipment